Schematic
flying machine for use in push miners.
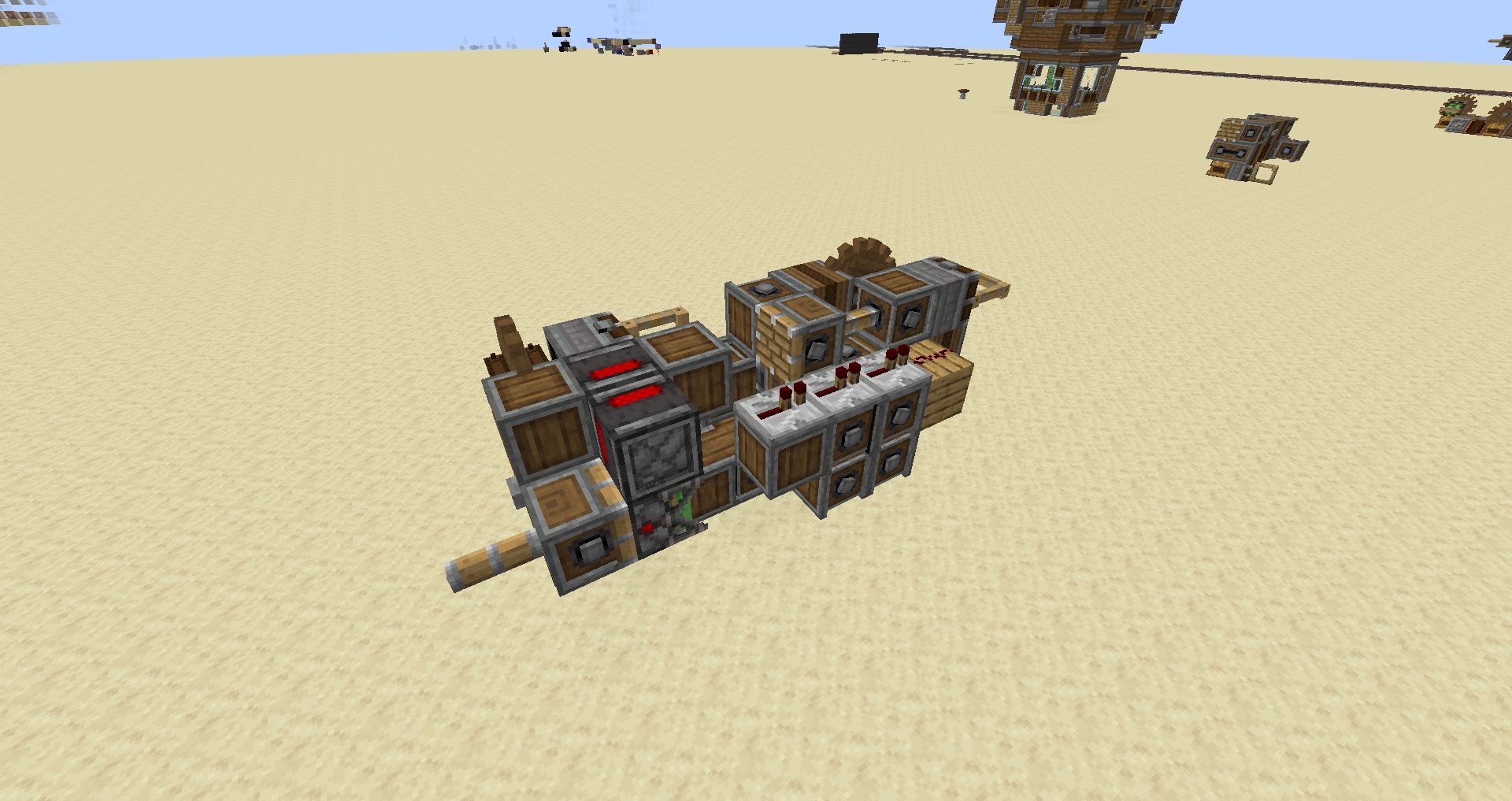
Uses mechanical baring to swap what direction rear piston is moving, thus allowing it to push as long as it takes for the head side to finish mining before it starts retracting the rear piston. Then front pulls rear forward and starts again.
sequenced geardrive has issues with actually checking if the action programmed was completed, like you input 180 deg but it only goes 90 it will still stop, cause all its programs are just timers based on input speed.
sequenced geardrive has issues with actually checking if the action programmed was completed, like you input 180 deg but it only goes 90 it will still stop, cause all its programs are just timers based on input speed.
Mod Version
0.5.0 (a-c)
Game Version
1.18.X
Category
Uploaded
3 years ago
Author
Views
3868
Rating
5.0 based on 1
ratings